Робот для игры в настольный теннис
Даже матч по настольному теннису больше не является проблемой для нового робота от Google DeepMind! Искусственный интеллект доказывает свою способность справляться со сложными задачами, требующими быстрых решений, во все большем количестве областей.

Сочетая искусственный интеллект Google DeepMind с промышленным роботом-манипулятором ABB, был создан робот для игры в настольный теннис, демонстрирующий серьезные результаты на любительском уровне. Робот соревновался с людьми и сумел выиграть 45% матчей (подробности ниже), что уже является значительным достижением.
Как это работает?
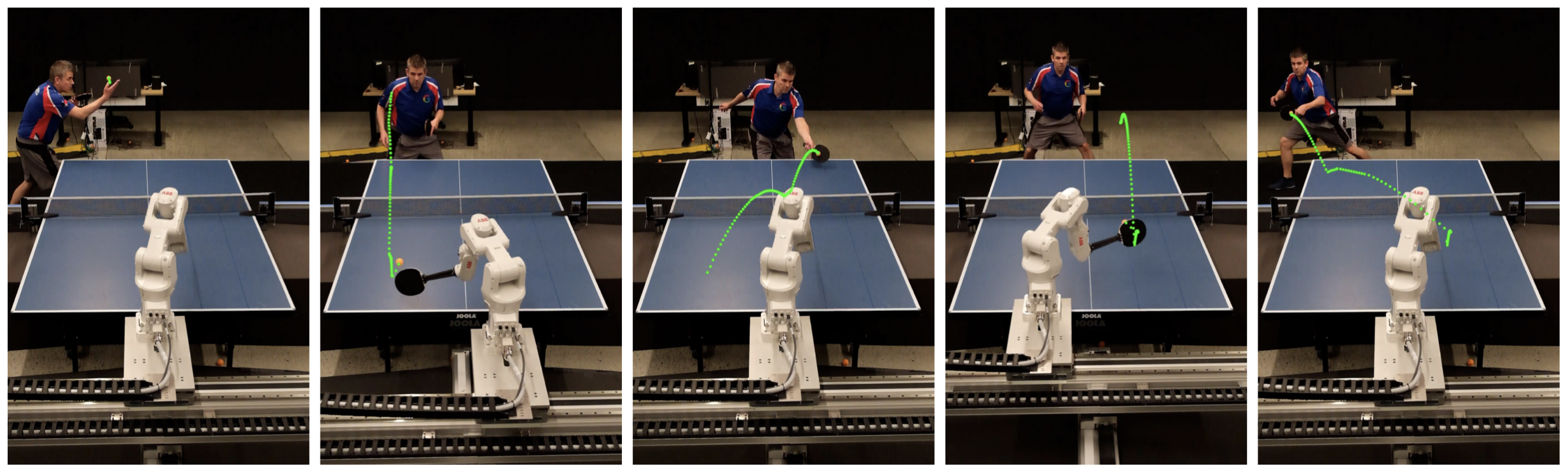
Сердцем робота является промышленный робот-манипулятор ABB IRB 1100, оснащенный фирменным программным обеспечением DeepMind на основе искусственного интеллекта. Это программное обеспечение позволяет роботу выполнять различные удары в настольном теннисе, такие как форхенды и бэкхенды. Каждое движение основано на навыке низкого уровня, который контроллер высокого уровня робота выбирает и использует в наиболее подходящие моменты. Благодаря такому модульному подходу робот гибко адаптируется к различным игровым ситуациям.
 Источник: DeepMind
Источник: DeepMind
Реальные результаты: Насколько искусен робот?
Он сыграл 29 матчей против людей с разным уровнем подготовки. Результаты оказались неоднозначными: он достиг 100% побед над новичками, при этом выиграв 55% у игроков среднего уровня. Однако ему не удалось выиграть у продвинутых игроков, проиграв все матчи в этой категории. Несмотря на это, робот в целом показывает результаты на уверенном любительском уровне, что представляет собой значительный шаг вперед в применении искусственного интеллекта в реальных сценариях.
Источник: DeepMind
Как робот учится?
В процессе обучения робот начал учиться в смоделированной среде, а затем практиковался в реальном мире для дальнейшего развития своих навыков. Система научилась справляться с различными вращениями и скоростями мяча, хотя все еще испытывает трудности с некоторыми задачами, такими как высокоскоростные мячи или прогнозирование сильно закрученных ударов. Эти проблемы подчеркивают, насколько сложно имитировать физику реального мира для программного обеспечения (Парадокс Моравека) и подчеркивают, что дальнейшее развитие прогностических моделей ИИ имеет важное значение для дальнейшего развития роботов.
Почему этот робот важен?
Хотя робот для игры в настольный теннис на первый взгляд может показаться просто интересной игрушкой, он представляет собой гораздо большее. Используемые здесь технологии, такие как иерархическая архитектура политик и адаптация в реальном времени, применимы во многих других областях, требующих быстрой реакции и адаптивности. Будь то домашняя автоматизация или складские задачи, эти разработки знаменуют собой новый уровень робототехники, приближая нас к эффективному сотрудничеству между машинами и людьми.





